






 咨询服务
咨询服务 帮助中心
帮助中心 联系我们
联系我们
 技术资讯
技术资讯 飞思课堂
飞思课堂 精彩活动
精彩活动




飞思无人系统仿真开发平台是在北航可靠飞行控制组提出的RflySim仿真框架的基础上开发的一体化无人机系统仿真开发平台。飞思无人系统仿真开发平台专为无人机飞控开发、大规模集群协同、人工智能视觉等前沿研究领域,研发的一套高可信度的无人控制系统开发、测试与评估平台。
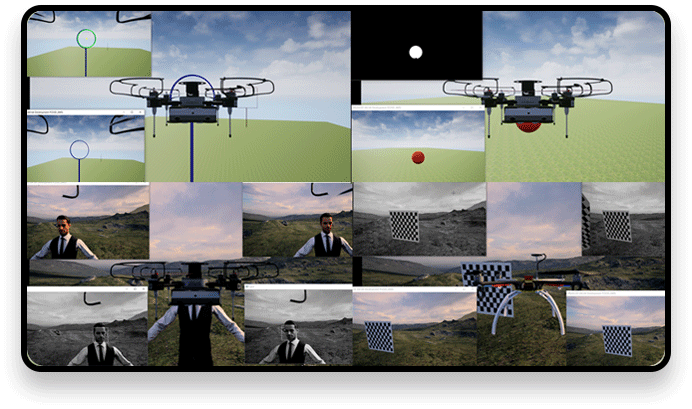
它支持多旋翼、固定翼、无人车、垂直起降飞行器(VTOL)等多种机型。采用分布式构架,非常适合大规模集群与视觉仿真测试开发。利用高逼真的3D环境,实现真实的视觉体验,提供高度逼真的视觉开发环境。
飞思无人系统仿真开发平台是一个基于 MATLAB/Simulink 和Pixhawk 的多旋翼飞行器控制算法快速开发平台。采用基于模型设计思想对无人机飞控进行快速开发与测试。
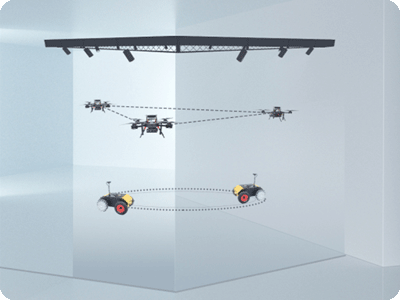
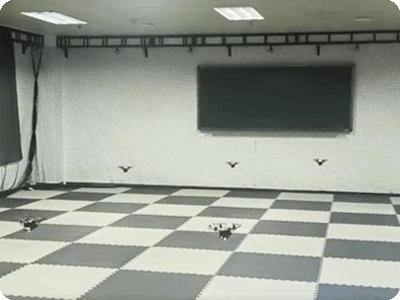
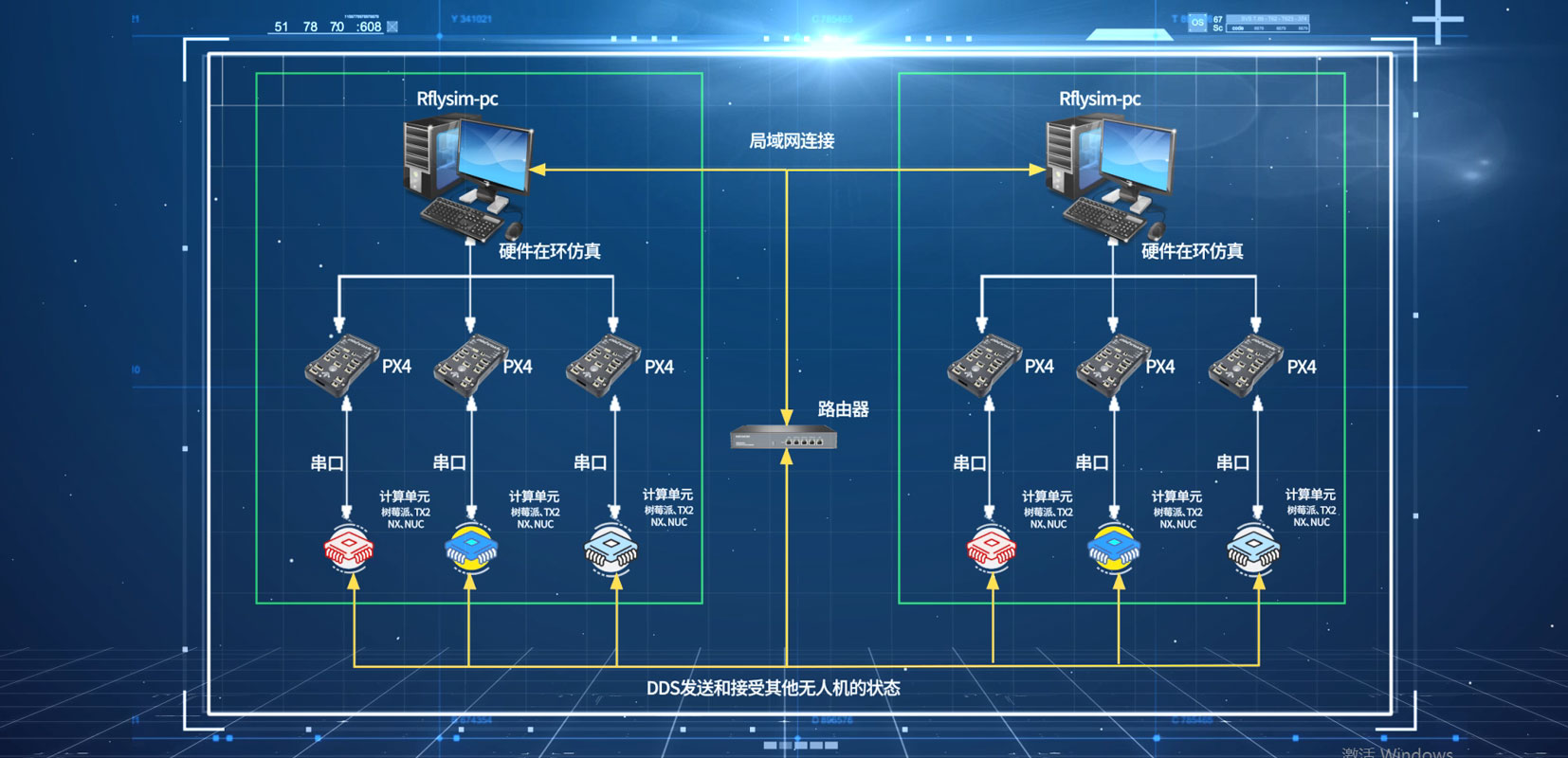
飞思无人系统仿真开发平台支持多机集群仿真功能。具有一键启动脚 本,可以部署多机集群仿真。利用多台电脑分布式仿真方式可轻松实现50-100架超大规模无人机集群仿真。具有matlab集群控制接品控制实例。通过集群软件在环仿真与集群硬件在环仿真结合仿真方式紧密联系实际环境进行算法验证。
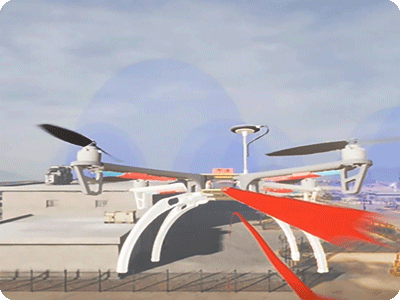
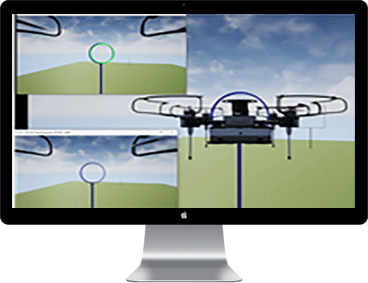
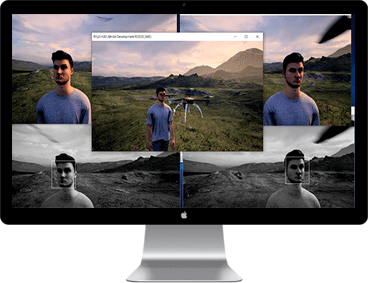
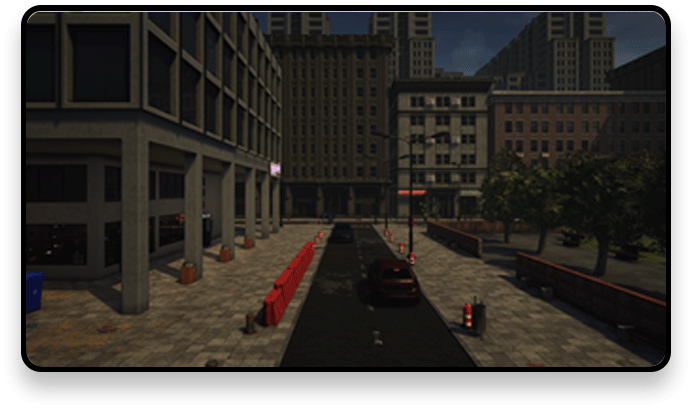
飞思无人系统仿真开发平台支持视觉开发仿真功能,基于rflysim3D的三维视景平台支持视角切换功能,可以获取方便地获取到多个视角的图像数据。支持通过共享内存或窗口图像抓取的方式在 Simulink、Python、C/C++ 等代码平台中实时获取到图像数据并进行处理。形成带视觉的硬件在环仿真回路。


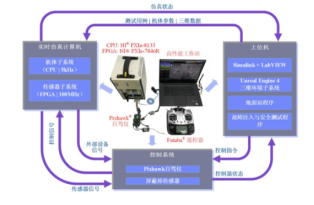
整个研究框架扩展到所有的无人控制系统,形成一个标
准的自动开发、测试与评估框架体系
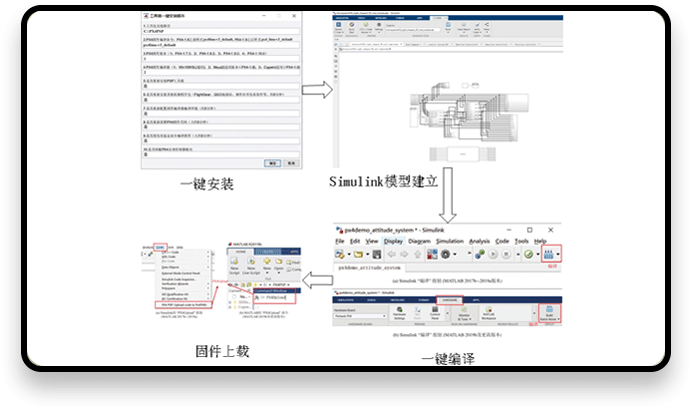
在Windows平台下进行一键安装、一键代码生成、一键固件部署、一键软硬件在环仿真和快速实飞, 非常方便易用。用户不需要了解飞控源码、Linux编程、C/C++编程、网络通信、飞机组装等底层知识,只需具备基础的Simulink(或Python)知识,即可快速将自己的算法经过层层验证并应用于真机上,有助于更专注于算法的开发与测试。
RflySim的构架完全是分布式的。RflySim中的所有应用软件都可以在同一台或多台电脑上多开, 并且各个应用之间可以通过UDP网络相互收发消息。这种分布式的构架非常适合于大规模带视觉的 无人机集群仿真测试。
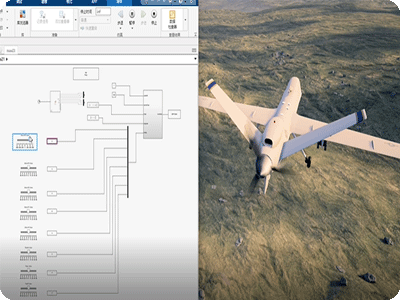
RflySim支持小车、固定翼、垂直起降飞行器(VTOL)等多种机型。 用户可以在Simulink中根据规范的接口搭建机架模型,然后自动生 成DLL文件用于HIL仿真。进一步实验平台能被拓展到任意无人系统中。




我们提供了源码和教程帮助用户在虚幻4 (Unreal En gine 4 ,UE4)中搭建高度逼真的3D场景,用于室内外 环境仿真或者基于视觉算法的开发。



| 固件版本 | PX4 1.7.3+1.8.2 |
| 编译器 | MSys2 |
| 支持系统 | 底层飞控算法开发:Win7及以上版本 |
| 配置要求 | 低 |
| SIL/HIL仿真模式 | PX4硬件在环仿真 |
| PX4自动代码生成 | 支持,限1.7~1.8版本固件,对最新硬件可能存在兼容性问题 |
| UE4三维视景引擎 RflySim3D | 不支持 |
| CopterSim导入Simulink 生成DLL模型以适配其他机型 | 不支持 |
| CopterSim集群功能 | 不支持 |
| CopterSim联机多台电脑 分布式仿真 | 不支持 |
| CopterSim连接嵌入式电脑进行 视觉硬件在环仿真 | 不支持 |
| 固件版本 | PX4 1.7.3+1.8.2 |
| 编译器 | MSys2 |
| 支持系统 | 底层飞控算法开发:Win7及以上版本 |
| 配置要求 | 低 |
| SIL/HIL仿真模式 | PX4硬件在环仿真 |
| PX4自动代码生成 | 支持,限1.7~1.8版本固件,对最新硬件可能存在兼容性问题 |
| UE4三维视景引擎 RflySim3D | 不支持 |
| CopterSim导入Simulink 生成DLL模型以适配其他机型 | 不支持 |
| CopterSim集群功能 | 不支持 |
| CopterSim联机多台电脑 分布式仿真 | 不支持 |
| CopterSim连接嵌入式电脑进行 视觉硬件在环仿真 | 不支持 |
| 固件版本 | PX4 1.7.3+1.8.2 |
| 编译器 | MSys2 |
| 支持系统 | 底层飞控算法开发:Win7及以上版本 |
| 配置要求 | 低 |
| SIL/HIL仿真模式 | PX4硬件在环仿真 |
| PX4自动代码生成 | 支持,限1.7~1.8版本固件,对最新硬件可能存在兼容性问题 |
| UE4三维视景引擎 RflySim3D | 不支持 |
| CopterSim导入Simulink 生成DLL模型以适配其他机型 | 不支持 |
| CopterSim集群功能 | 不支持 |
| CopterSim联机多台电脑 分布式仿真 | 不支持 |
| CopterSim连接嵌入式电脑进行 视觉硬件在环仿真 | 不支持 |